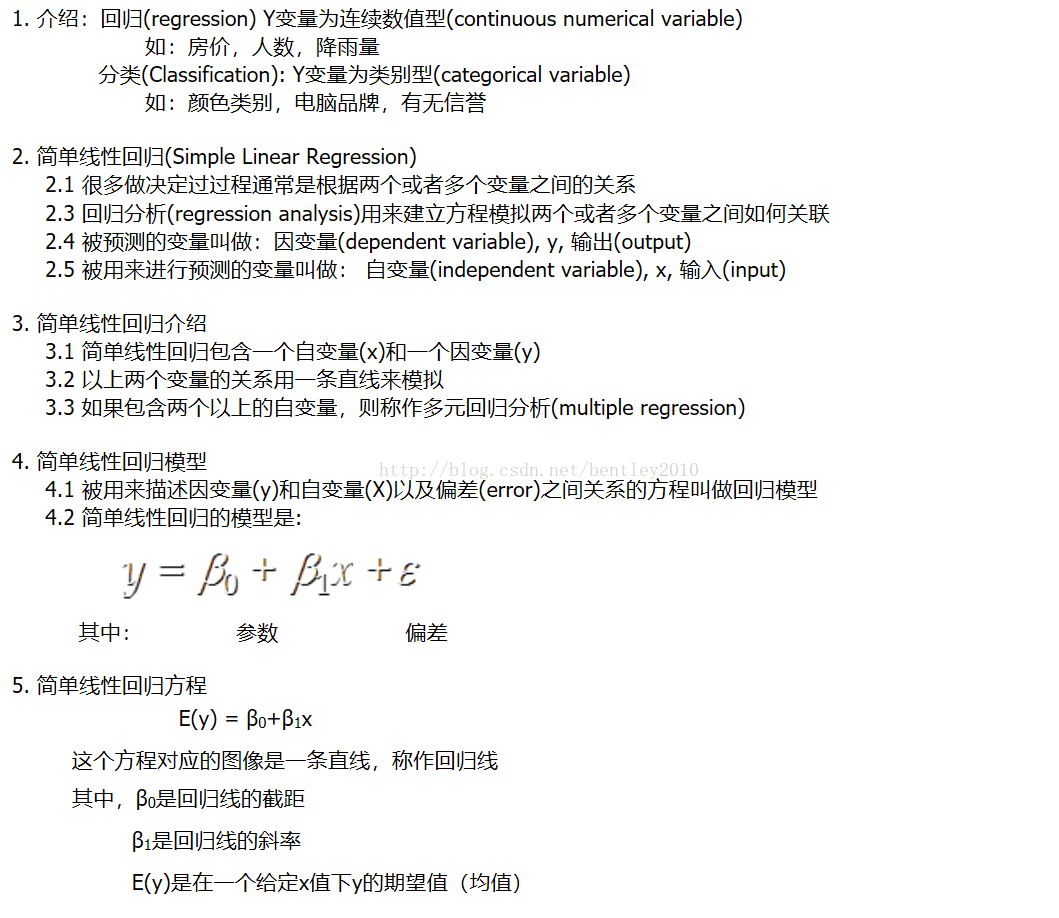
Python 3 利用 Dlib 实现摄像头实时人脸识别
Python 3 利用 Dlib 实现摄像头实时人脸识别
0. 引言
利用 Python 开发,借助 Dlib 库捕获摄像头中的人脸,提取人脸特征,通过计算特征值之间的欧氏距离,来和预存的人脸特征进行对比,判断是否匹配,达到人脸识别的目的;
可以从摄像头中抠取人脸图片存储到本地,然后提取构建预设人脸特征;
根据抠取的 / 已有的同一个人多张人脸图片提取 128D 特征值,然后计算该人的 128D 特征均值;
然后和摄像头中实时获取到的人脸提取出的特征值,计算欧氏距离,判定是否为同一张人脸;
Python + OpenCv + Dlib ;
Features :
- 支持人脸数据采集,自行建立人脸数据库 / Support face register
- 调用摄像头实时人脸检测和识别 / Using camera to real-time detect and recognize faces
- 支持多张人脸 / Support multi-faces
人脸识别 / Face Recognition 的说明:
Wikipedia 上关于人脸识别系统 / Face Recognition System 的描述:they work by comparing selected facial features from given image with faces within a database.
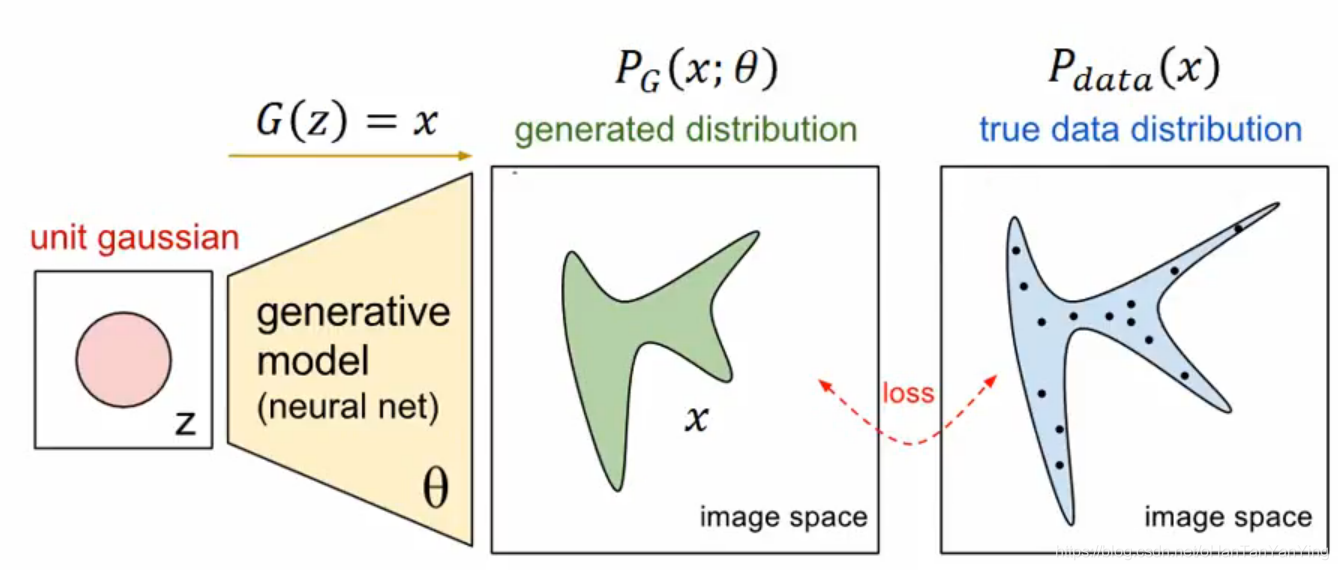
本项目中就是比较 预设的人脸的特征 和 摄像头实时获取到的人脸的特征 ;
核心就是 提取 128D 人脸特征,然后计算 摄像头人脸特征 和 预设的特征脸的\欧式距离,**进行比对;**
效果如下:
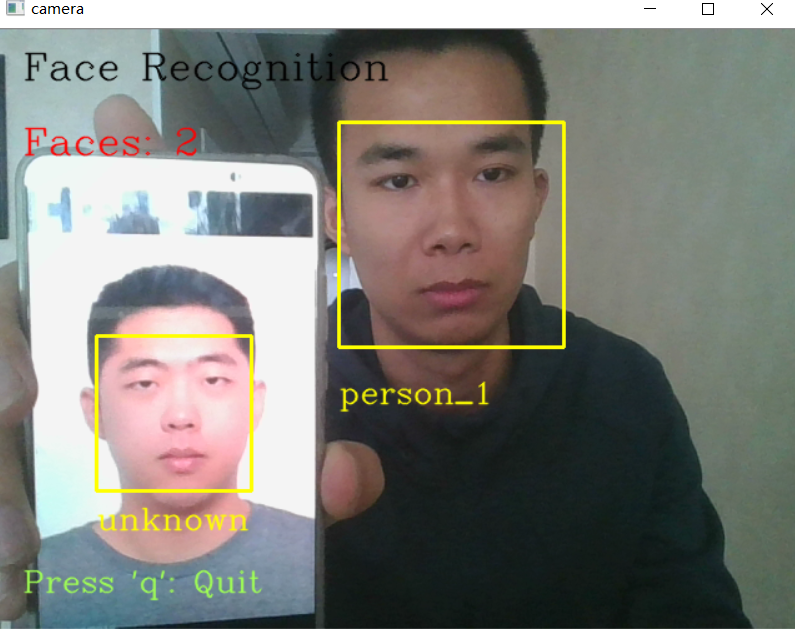
图 1 摄像头多个人脸时识别效果
1. 总体流程
先说下 人脸检测 ( Face detection ) 和 人脸识别 ( Face Recognition ) ,前者是达到检测出场景中人脸的目的就可以了,而后者不仅需要检测出人脸,还要和已有人脸数据进行比对,识别出是否在数据库中,或者进行身份标注之类处理,人脸检测和人脸识别两者有时候可能会被理解混淆;
我的之前一些项目都是用 Dlib 做人脸检测这块,这个项目想要实现的功能是人脸识别功能,借助的是 Dlib 官网中 face_recognition.py 这个例程 ( Link:http://dlib.net/face_recognition.py.html );
核心在于 利用“dlib_face_recognition_resnet_model_v1.dat” 这个 model,提取人脸图像的 128D 特征,然后比对不同人脸图片的 128D 特征,设定阈值 计算欧氏距离 来判断是否为同一张脸;
1 | 1 # face recognition model, the object maps human faces into 128D vectors2 facerec = dlib.face_recognition_model_v1("dlib_face_recognition_resnet_model_v1.dat")3 4 shape = predictor(img, dets[0])5 face_descriptor = facerec.compute_face_descriptor(img, shape) |
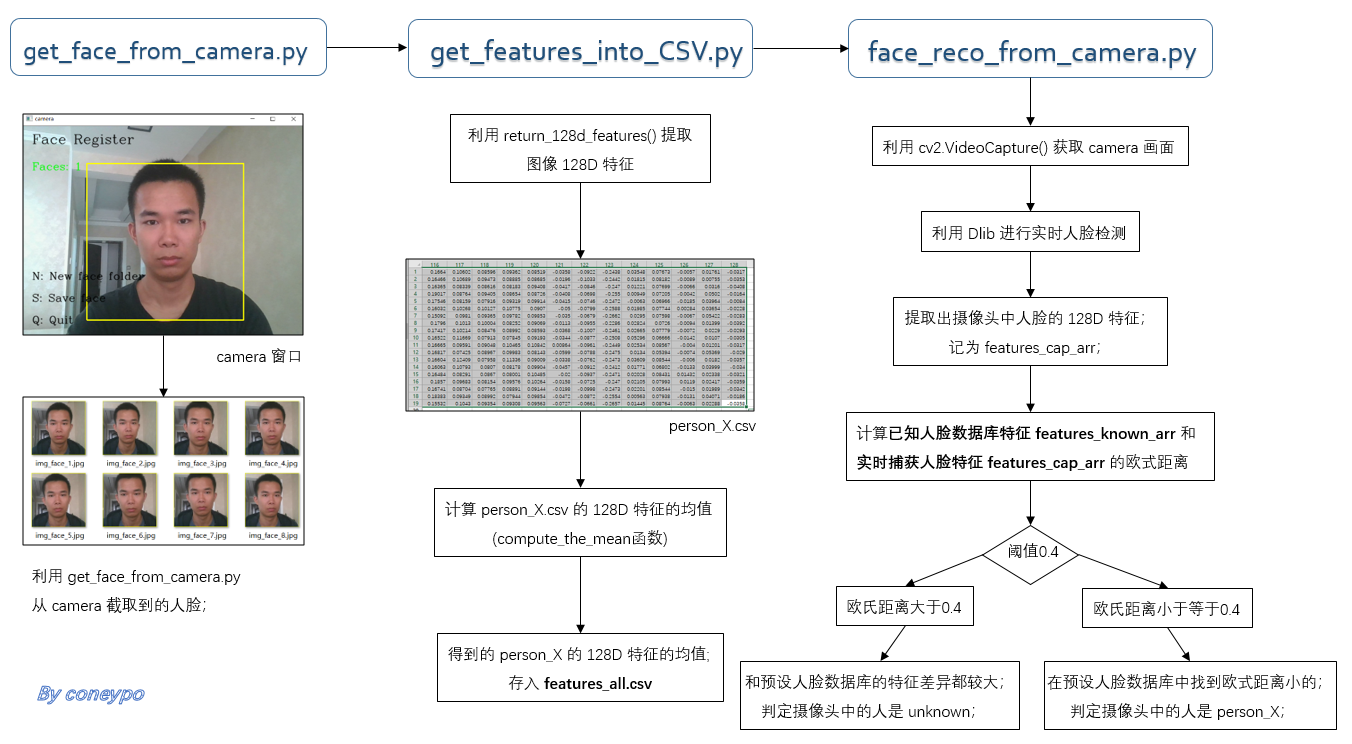
图 2 总体设计流程
2.源码介绍
主要有
get_face_from_camera.py\ ,
get_features_into_CSV.py\ ,
face_reco_from_camera.py
这三个 Python 文件,接下来会分别介绍实现功能;
2.1 get_face_from_camera.py / 人脸注册录入
人脸识别需要将 提取到的图像数据 和 已有图像数据 进行比对分析,所以这部分代码实现的功能就是 人脸录入;
程序会生成一个窗口,显示调用的摄像头实时获取的图像;
(关于摄像头的调用方式可以参考这里: Python 3 利用 Dlib 19.7 实现摄像头人脸检测特征点标定);
然后根据键盘输入进行人脸捕获:
- “N” 新录入人脸,新建文件夹 person_X/ 用来存储某人的人脸图像
- “S” 开始捕获人脸,将捕获到的人脸放到 person_X/ 路径下
- “Q” 退出窗口
摄像头的调用是利用 opencv 库的 cv2.VideoCapture(0), 此处参数为 0 代表调用的是笔记本的默认摄像头,你也可以让它调用传入已有视频文件;
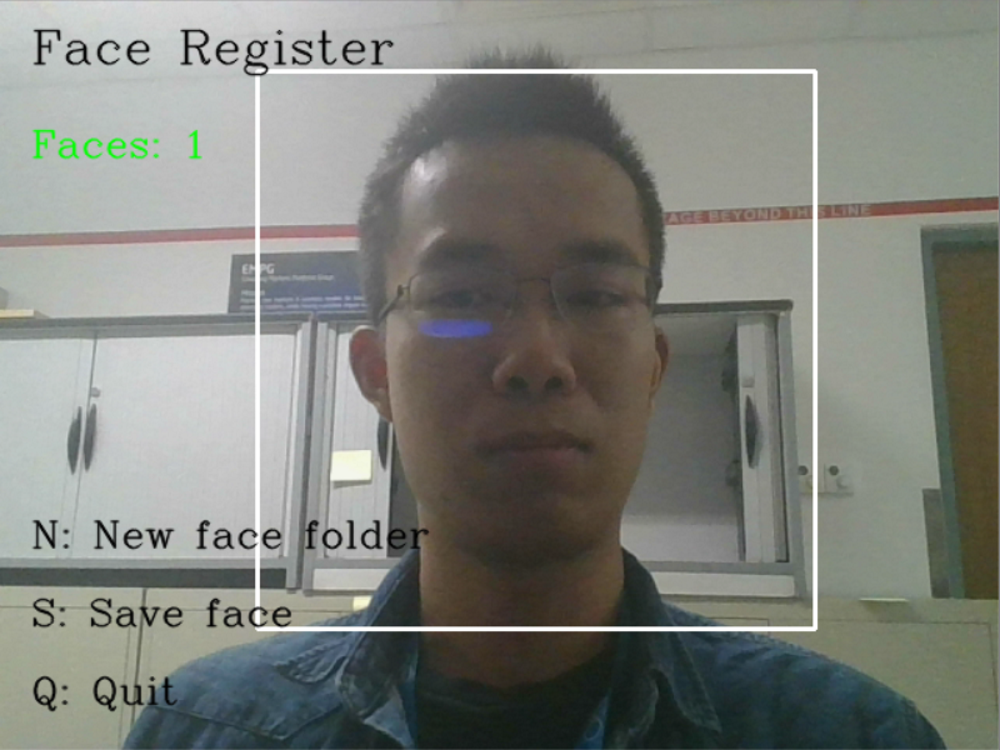
图 3 get_face_from_camera.py 的界面
捕获到的一组人脸示例;

图 4 捕获到的一组人脸
get_face_from_camera.py 源码

1 |
# 进行人脸录入 / face register
# 录入多张人脸 / support multi-faces
# Author: coneypo
# Blog: http://www.cnblogs.com/AdaminXie
# GitHub: https://github.com/coneypo/Dlib_face_recognition_from_camera
# Mail: coneypo@foxmail.com
# Created at 2018-05-11
# Updated at 2018-10-29
import dlib # 人脸处理的库 Dlib
import numpy as np # 数据处理的库 Numpy
import cv2 # 图像处理的库 OpenCv
import os # 读写文件
import shutil # 读写文件
# Dlib 正向人脸检测器
detector = dlib.get_frontal_face_detector()
# Dlib 68 点特征预测器
predictor = dlib.shape_predictor(‘data/data_dlib/shape_predictor_68_face_landmarks.dat’)
# OpenCv 调用摄像头
cap = cv2.VideoCapture(0)
# 设置视频参数
cap.set(3, 480)
# 人脸截图的计数器
cnt_ss = 0
# 存储人脸的文件夹
current_face_dir = 0
# 保存的路径
path_make_dir = “data/data_faces_from_camera/“
path_csv = “data/data_csvs_from_camera/“
# (optional) 删除之前存的人脸数据文件夹
def pre_clear():
folders_rd = os.listdir(path_make_dir)
for i in range(len(folders_rd)):
shutil.rmtree(path_make_dir+folders_rd[i])
csv_rd = os.listdir(path_csv)
for i in range(len(csv_rd)):
os.remove(path_csv+csv_rd[i])
# 每次程序录入之前,删掉之前存的人脸数据
pre_clear()
# 人脸种类数目的计数器
person_cnt = 0
while cap.isOpened():
# 480 height * 640 width
flag, img_rd = cap.read()
kk = cv2.waitKey(1)
img_gray = cv2.cvtColor(img_rd, cv2.COLOR_RGB2GRAY)
# 人脸数 faces
faces = detector(img_gray, 0)
# 待会要写的字体
font = cv2.FONT_HERSHEY_COMPLEX
# 按下 ‘n’ 新建存储人脸的文件夹
if kk == ord(‘n’):
person_cnt += 1
current_face_dir = path_make_dir + “person_” + str(person_cnt)
print(‘\n’)
for dirs in (os.listdir(path_make_dir)):
if current_face_dir == path_make_dir + dirs:
shutil.rmtree(current_face_dir)
print(“删除旧的文件夹:”, current_face_dir)
os.makedirs(current_face_dir)
print(“新建的人脸文件夹: “, current_face_dir)
# 将人脸计数器清零
cnt_ss = 0
if len(faces) != 0:
# 检测到人脸
# 矩形框
for k, d in enumerate(faces):
# 计算矩形大小
# (x,y), (宽度width, 高度height)
pos_start = tuple([d.left(), d.top()])
pos_end = tuple([d.right(), d.bottom()])
# 计算矩形框大小
height = (d.bottom() - d.top())
width = (d.right() - d.left())
hh = int(height/2)
ww = int(width/2)
# 设置颜色 / The color of rectangle of faces detected
color_rectangle = (255, 255, 255)
if (d.right()+ww) > 640 or (d.bottom()+hh>480) or (d.left()-ww < 0) or ( d.top()-hh < 0):
cv2.putText(img_rd, “OUT OF RANGE”, (20, 300), font, 0.8, (0, 0, 255), 1, cv2.LINE_AA)
color_rectangle = (0, 0, 255)
else:
color_rectangle = (255, 255, 255)
cv2.rectangle(img_rd,
tuple([d.left() - ww, d.top() - hh]),
tuple([d.right() + ww, d.bottom() + hh]),
color_rectangle, 2)
# 根据人脸大小生成空的图像
im_blank = np.zeros((int(height2), width2, 3), np.uint8)
# 按下 ‘s’ 保存摄像头中的人脸到本地
if kk == ord(‘s’):
cnt_ss += 1
for ii in range(height*2):
for jj in range(width*2):
im_blank[ii][jj] = img_rd[d.top()-hh + ii][d.left()-ww + jj]
cv2.imwrite(current_face_dir + “/img_face_” + str(cnt_ss) + “.jpg”, im_blank)
print(“写入本地:”, str(current_face_dir) + “/img_face_” + str(cnt_ss) + “.jpg”)
# 显示人脸数
cv2.putText(img_rd, “Faces: “ + str(len(faces)), (20, 100), font, 0.8, (0, 255, 0), 1, cv2.LINE_AA)
# 添加说明
cv2.putText(img_rd, “Face Register”, (20, 40), font, 1, (0, 0, 0), 1, cv2.LINE_AA)
cv2.putText(img_rd, “N: New face folder”, (20, 350), font, 0.8, (0, 0, 0), 1, cv2.LINE_AA)
cv2.putText(img_rd, “S: Save face”, (20, 400), font, 0.8, (0, 0, 0), 1, cv2.LINE_AA)
cv2.putText(img_rd, “Q: Quit”, (20, 450), font, 0.8, (0, 0, 0), 1, cv2.LINE_AA)
# 按下 ‘q’ 键退出
if kk == ord(‘q’):
break
# 窗口显示
# cv2.namedWindow(“camera”, 0) # 如果需要摄像头窗口大小可调
cv2.imshow(“camera”, img_rd)
# 释放摄像头
cap.release()
# 删除建立的窗口
cv2.destroyAllWindows()
考虑到有可能需要保存的矩形框超出摄像头范围,对于这种异常,如果矩形框超出范围,矩形框会从白变红,然后提示 “OUT OF RANGE”;
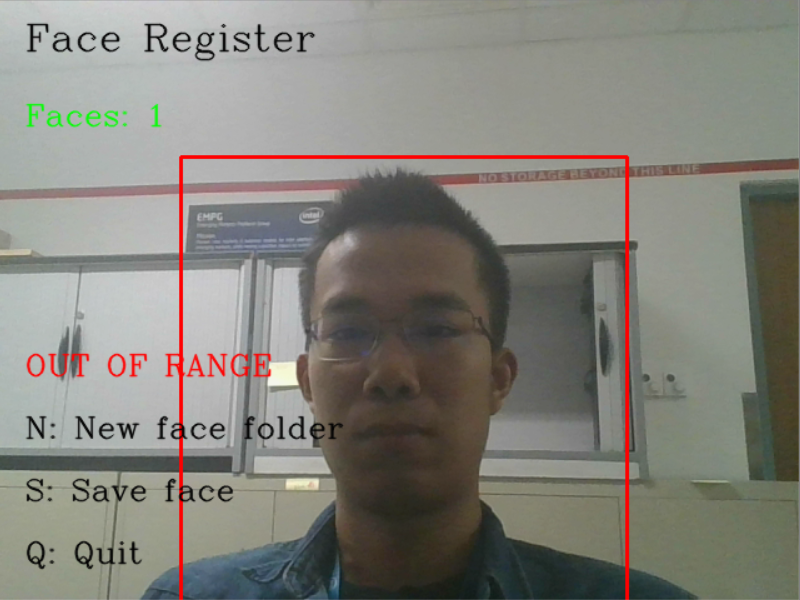
图 5 人脸录入异常处理
get_face_from_camera.py 的输出 log
1 | 删除旧的文件夹: F:/code/python/P_dlib_face_reco/data/faces_from_camera/person_1 |
2.2 get_features_into_CSV.py / 将图像文件中人脸数据提取出来存入 CSV
这部分代码实现的功能是将之前捕获到的人脸图像文件,提取出 128D 特征,然后计算出某人人脸数据的特征均值存入 CSV 中,方便之后识别时候进行比对;
利用 numpy.mean() 计算特征均值;
get_features_into_CSV.py 源码:
1 |
# 从人脸图像文件中提取人脸特征存入 CSV
# Author: coneypo
# Blog: http://www.cnblogs.com/AdaminXie
# GitHub: https://github.com/coneypo/Dlib_face_recognition_from_camera
# Mail: coneypo@foxmail.com
# Created at 2018-05-11
# Updated at 2018-10-29
# 增加录入多张人脸到 CSV 的功能
# return_128d_features() 获取某张图像的 128D 特征
# write_into_csv() 获取某个路径下所有图像的特征,并写入 CSV
# compute_the_mean() 从 CSV 中读取 128D 特征,并计算特征均值
import cv2
import os
import dlib
from skimage import io
import csv
import numpy as np
import pandas as pd
path_faces_rd = “data/data_faces_from_camera/“
path_csv = “data/data_csvs_from_camera/“
# Dlib 正向人脸检测器
detector = dlib.get_frontal_face_detector()
# Dlib 人脸预测器
predictor = dlib.shape_predictor(“data/data_dlib/shape_predictor_5_face_landmarks.dat”)
# Dlib 人脸识别模型
# Face recognition model, the object maps human faces into 128D vectors
facerec = dlib.face_recognition_model_v1(“data/data_dlib/dlib_face_recognition_resnet_model_v1.dat”)
# 返回单张图像的 128D 特征
def return_128d_features(path_img):
img = io.imread(path_img)
img_gray = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
faces = detector(img_gray, 1)
print(“检测的人脸图像:”, path_img, “\n”)
# 因为有可能截下来的人脸再去检测,检测不出来人脸了
# 所以要确保是 检测到人脸的人脸图像 拿去算特征
if len(faces) != 0:
shape = predictor(img_gray, faces[0])
face_descriptor = facerec.compute_face_descriptor(img_gray, shape)
else:
face_descriptor = 0
print(“no face”)
# print(face_descriptor)
return face_descriptor
# 将文件夹中照片特征提取出来,写入 CSV
# path_faces_personX: 图像文件夹的路径
# path_csv: 要生成的 CSV 路径
def write_into_csv(path_faces_personX, path_csv):
dir_pics = os.listdir(path_faces_personX)
with open(path_csv, “w”, newline=””) as csvfile:
writer = csv.writer(csvfile)
for i in range(len(dir_pics)):
# 调用return_128d_features()得到128d特征
print(“正在读的人脸图像:”, path_faces_personX + “/“ + dir_pics[i])
features_128d = return_128d_features(path_faces_personX + “/“ + dir_pics[i])
# print(features_128d)
# 遇到没有检测出人脸的图片跳过
if features_128d == 0:
i += 1
else:
writer.writerow(features_128d)
# 读取某人所有的人脸图像的数据,写入 person_X.csv
faces = os.listdir(path_faces_rd)
for person in faces:
print(path_csv + person + “.csv”)
write_into_csv(path_faces_rd + person, path_csv + person + “.csv”)
# 从 CSV 中读取数据,计算 128D 特征的均值
def compute_the_mean(path_csv_rd):
column_names = []
# 128列特征
for feature_num in range(128):
column_names.append(“features_” + str(feature_num + 1))
# 利用pandas读取csv
rd = pd.read_csv(path_csv_rd, names=column_names)
# 存放128维特征的均值
feature_mean = []
for feature_num in range(128):
tmp_arr = rd[“features_” + str(feature_num + 1)]
tmp_arr = np.array(tmp_arr)
# 计算某一个特征的均值
tmp_mean = np.mean(tmp_arr)
feature_mean.append(tmp_mean)
return feature_mean
# 存放所有特征均值的 CSV 的路径
path_csv_feature_all = “data/features_all.csv”
# 存放人脸特征的 CSV 的路径
path_csv_rd = “data/data_csvs_from_camera/“
with open(path_csv_feature_all, “w”, newline=””) as csvfile:
writer = csv.writer(csvfile)
csv_rd = os.listdir(path_csv_rd)
print(“得到的特征均值 / The generated average values of features stored in: “)
for i in range(len(csv_rd)):
feature_mean = compute_the_mean(path_csv_rd + csv_rd[i])
# print(feature_mean)
print(path_csv_rd + csv_rd[i])
writer.writerow(feature_mean)
我们可以看下对于某张图片,face_descriptor 这个 128D vectors 的输出结果:
绿色框内是我们的返回 128D 特征的函数;
在红色框内调用该函数来计算 img_face_13.jpg;
可以看到黄色框中的输出为 128D 的向量;
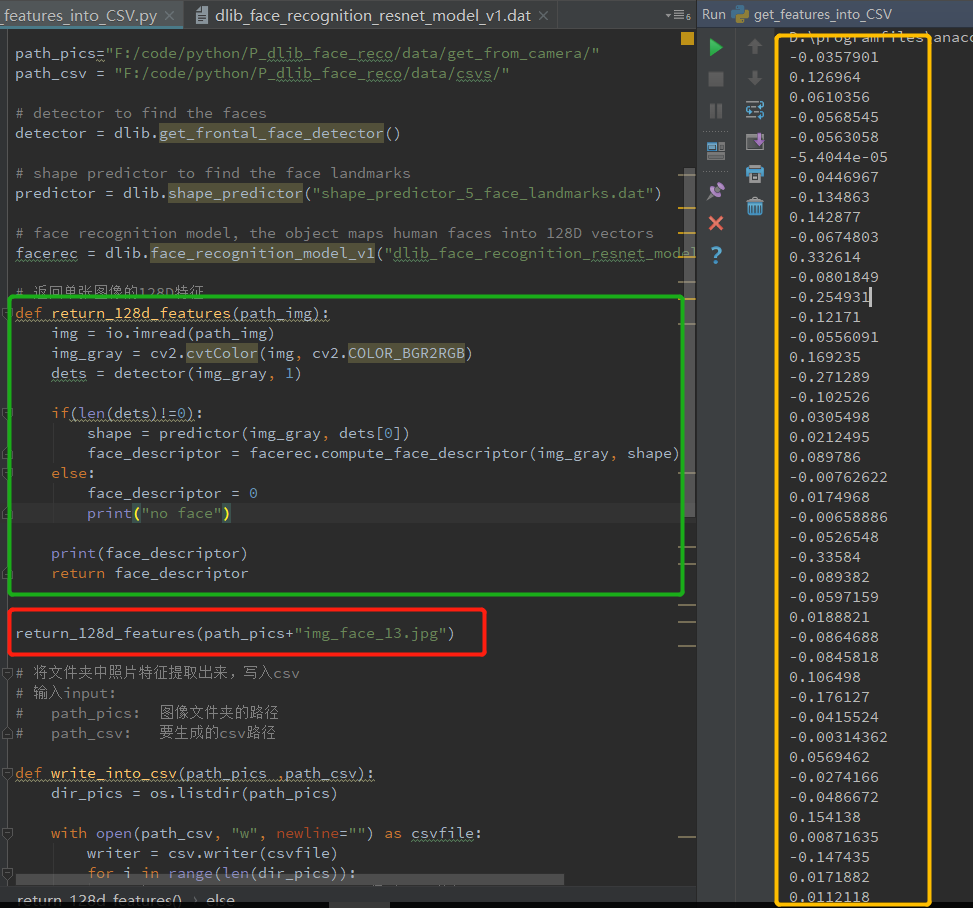
图 6 返回单张图像的 128D 特征的计算结果
之后就需要人脸图像进行批量化操作,提取出 128D 的特征,然后计算特征均值,存入 features_all.csv;
features_all.csv 是一个 n 行 128 列的 CSV, n 是录入的人脸数,128 列是某人的 128D 特征;
这存储的就是 录入的人脸数据,之后 摄像头捕获的人脸 将要拿过来和 这些特征值 进行比对,如果欧式距离比较近的话,就可以认为是同一张人脸;
get_features_into_CSV.py 的输出 log:
1 | F:/code/python/P_dlib_face_reco/data/csvs_from_camera/person_1.csv |
2.3 face_reco_from_camera.py / 实时人脸识别对比分析
这部分源码实现的功能:调用摄像头,捕获摄像头中的人脸,然后如果检测到人脸,将 摄像头中的人脸提取出 128D 的特征,然后和 之前录入人脸的 128D 特征 进行计算欧式距离,如果比较小,可以判定为一个人,否则不是一个人;
欧氏距离对比的阈值设定,是在 return_euclidean_distance 函数的 dist 变量;
我这里程序里面指定的 欧氏距离判断阈值是 0.4,具体阈值可以根据实际情况或者测得结果进行修改;
这边做了一个,让人名跟随显示在头像下方,如果想要在人脸矩形框下方显示人名,首先需要知道 Dlib 生成的矩形框的尺寸怎么读取;
Dlib 返回的 dets 变量是一系列人脸的数据,此处对单张人脸处理,所以取 dets[0] 的参数;
可以通过 dets[0].top(), dets[0].bottom(), dets[0].left() 和 dets[0].right() 来确定要显示的人名的坐标;

图 7 dets[0].top() 等参数说明
得到矩形框的坐标,就可以获取人名的相对位置;
这是我这边取的坐标:
1 | pos_text_1 = tuple([dets[0].left(), int(dets[0].bottom()+(dets[0].bottom()-dets[0].top())/4)]) |
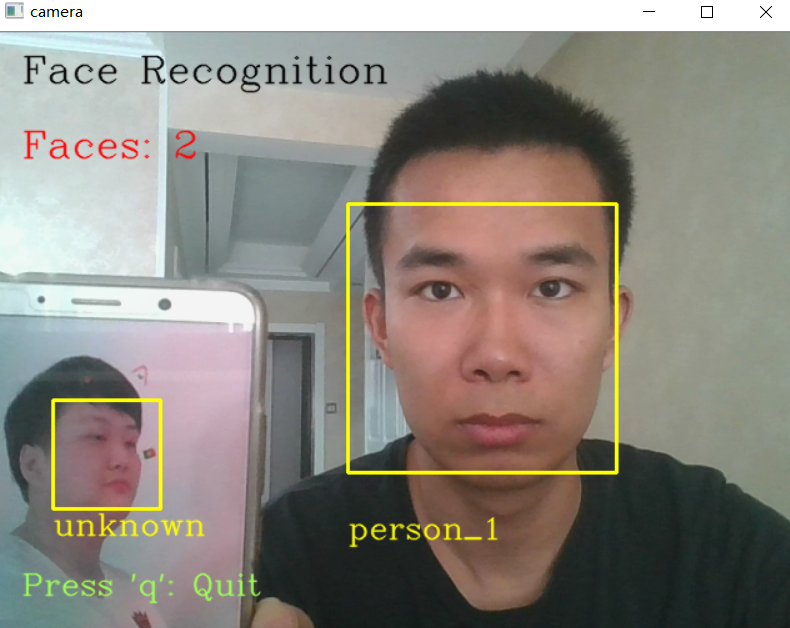
图 8 face_reco_from_camera.py 生成的人脸识别窗口界面
face_reco_from_camera.py 源码:
1 |
# created at 2018-05-11
# updated at 2018-09-08
# support multi-faces now
# Author: coneypo
# Blog: http://www.cnblogs.com/AdaminXie
# GitHub: https://github.com/coneypo/Dlib_face_recogqnition_from_camera
import dlib # 人脸识别的库dlib
import numpy as np # 数据处理的库numpy
import cv2 # 图像处理的库OpenCv
import pandas as pd # 数据处理的库Pandas
# face recognition model, the object maps human faces into 128D vectors
facerec = dlib.face_recognition_model_v1(“dlib_face_recognition_resnet_model_v1.dat”)
# 计算两个向量间的欧式距离
def return_euclidean_distance(feature_1, feature_2):
feature_1 = np.array(feature_1)
feature_2 = np.array(feature_2)
dist = np.sqrt(np.sum(np.square(feature_1 - feature_2)))
print(“e_distance: “, dist)
if dist > 0.4:
return “diff”
else:
return “same”
# 处理存放所有人脸特征的 CSV
path_features_known_csv = “data/features_all.csv”
csv_rd = pd.read_csv(path_features_known_csv, header=None)
# 存储的特征人脸个数
# print(csv_rd.shape[0])
# 用来存放所有录入人脸特征的数组
features_known_arr = []
# known faces
for i in range(csv_rd.shape[0]):
features_someone_arr = []
for j in range(0, len(csv_rd.ix[i, :])):
features_someone_arr.append(csv_rd.ix[i, :][j])
# print(features_someone_arr)
features_known_arr.append(features_someone_arr)
print(“Faces in Database:”, len(features_known_arr))
# Dlib 预测器
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(‘shape_predictor_68_face_landmarks.dat’)
# 创建 cv2 摄像头对象
cap = cv2.VideoCapture(0)
# cap.set(propId, value)
# 设置视频参数,propId 设置的视频参数,value 设置的参数值
cap.set(3, 480)
# 返回一张图像多张人脸的 128D 特征
def get_128d_features(img_gray):
dets = detector(img_gray, 1)
if len(dets) != 0:
face_des = []
for i in range(len(dets)):
shape = predictor(img_gray, dets[i])
face_des.append(facerec.compute_face_descriptor(img_gray, shape))
else:
face_des = []
return face_des
# cap.isOpened() 返回true/false 检查初始化是否成功
while cap.isOpened():
flag, img_rd = cap.read()
kk = cv2.waitKey(1)
# 取灰度
img_gray = cv2.cvtColor(img_rd, cv2.COLOR_RGB2GRAY)
# 人脸数 dets
faces = detector(img_gray, 0)
# 待会要写的字体
font = cv2.FONT_HERSHEY_COMPLEX
cv2.putText(img_rd, “Press ‘q’: Quit”, (20, 400), font, 0.8, (84, 255, 159), 1, cv2.LINE_AA)
# 存储人脸名字和位置的两个 list
# list 1 (faces): store the name of faces Jack unknown unknown Mary
# list 2 (pos_namelist): store the positions of faces 12,1 1,21 1,13 31,1
# 存储所有人脸的名字
pos_namelist = []
name_namelist = []
# 检测到人脸
if len(faces) != 0:
# 获取当前捕获到的图像的所有人脸的特征,存储到 features_cap_arr
features_cap_arr = []
for i in range(len(faces)):
shape = predictor(img_rd, faces[i])
features_cap_arr.append(facerec.compute_face_descriptor(img_rd, shape))
# 遍历捕获到的图像中所有的人脸
for k in range(len(faces)):
# 让人名跟随在矩形框的下方
# 确定人名的位置坐标
# 先默认所有人不认识,是 unknown
name_namelist.append(“unknown”)
# 每个捕获人脸的名字坐标
pos_namelist.append(tuple([faces[k].left(), int(faces[k].bottom() + (faces[k].bottom() - faces[k].top()) / 4)]))
# 对于某张人脸,遍历所有存储的人脸特征
for i in range(len(features_known_arr)):
print(“with person_”, str(i+1), “the “, end=’’)
# 将某张人脸与存储的所有人脸数据进行比对
compare = return_euclidean_distance(features_cap_arr[k], features_known_arr[i])
if compare == “same”: # 找到了相似脸
name_namelist[k] = “person_” + str(i+1)
# 矩形框
for kk, d in enumerate(faces):
# 绘制矩形框
cv2.rectangle(img_rd, tuple([d.left(), d.top()]), tuple([d.right(), d.bottom()]), (0, 255, 255), 2)
# 写人脸名字
for i in range(len(faces)):
cv2.putText(img_rd, name_namelist[i], pos_namelist[i], font, 0.8, (0, 255, 255), 1, cv2.LINE_AA)
print(“Name list now:”, name_namelist, “\n”)
cv2.putText(img_rd, “Face Register”, (20, 40), font, 1, (255, 255, 255), 1, cv2.LINE_AA)
cv2.putText(img_rd, “Faces: “ + str(len(faces)), (20, 100), font, 1, (0, 0, 255), 1, cv2.LINE_AA)
# 按下 q 键退出
if kk == ord(‘q’):
break
# 窗口显示
cv2.imshow(“camera”, img_rd)
# 释放摄像头
cap.release()
# 删除建立的窗口
cv2.destroyAllWindows()
1 |
face_reco_from_camera.py 输出 log:
1 | Faces in Database: 5Name list now: [] |
实时输出结果:
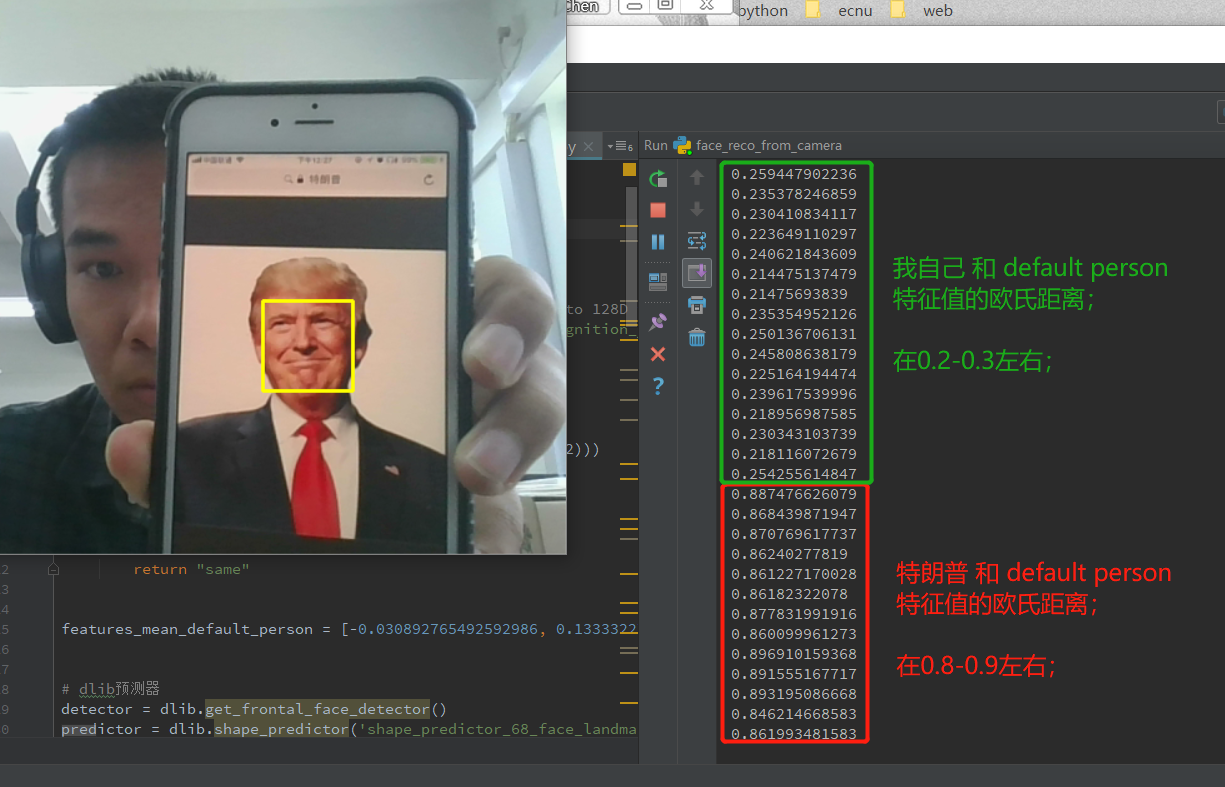
图 9 实时输出的欧氏距离结果
通过实时的输出结果,看的比较明显;
输出绿色部分:当是我自己时,计算出来的欧式距离基本都在 0.2 左右;
输出红色部分:而换一张图片上去比如特朗普,明显看到欧式距离计算结果 达到了 0.8,此时就可以判定,后来这张人脸不是一张人脸;
所以之前提到的欧式距离计算对比的阈值可以由此设定,本项目中取的是 dist=0.4;
dist 的确切取值自己权衡,http://dlib.net/face_recognition.py.html 的说明:
1 | # When using a distance threshold of 0.6, the dlib model obtains an accuracy# of 99.38% on the standard LFW face recognition benchmark, which is# comparable to other state-of-the-art methods for face recognition as of# February 2017. This accuracy means that, when presented with a pair of face# images, the tool will correctly identify if the pair belongs to the same# person or is from different people 99.38% of the time. |
3. 总结
核心就是 提取人脸特征,然后计算欧式距离和预设的特征脸进行比对;
不过这个实时获取摄像头人脸进行比对,要实时的进行计算摄像头脸的特征值,然后还要计算欧氏距离,所以计算量比较大,可能摄像头视频流会出现卡顿;
此项目仅个人学习爱好研究,开源供大家一起学习;